
آخرین مطالب
امکانات وب
کواترنیون های واحد که به عنوان ورسور شناخته می شوند ، یک نماد ریاضی مناسب برای نمایش جهت گیری های فضایی و چرخش عناصر در فضای سه بعدی ارائه می دهند. به طور خاص، آنها اطلاعات مربوط به یک چرخش محور-زاویه حول یک محور دلخواه را رمزگذاری می کنند . ربعهای چرخشی و جهتیابی در گرافیک کامپیوتری ، [1] بینایی کامپیوتر ، رباتیک ، [2] ناوبری ، دینامیک مولکولی ، دینامیک پرواز ، [3] مکانیک مداری ماهوارهها کاربرد دارند.، [4] و تجزیه و تحلیل بافت کریستالوگرافی . [5]
هنگامی که برای نشان دادن چرخش استفاده می شود، کواترنیون های واحد نیز به عنوان چهارتایی چرخشی نامیده می شوند زیرا آنها گروه چرخش سه بعدی را نشان می دهند . هنگامی که برای نشان دادن یک جهت (چرخش نسبت به یک سیستم مختصات مرجع) استفاده می شود، به آنها چهارتایی جهت گیری یا چهارگانه های نگرش می گویند . چرخش فضایی حول یک نقطه ثابت از




در مقایسه با ماتریس های چرخشی ، کواترنیون ها فشرده تر، کارآمدتر و از نظر عددی پایدارتر هستند . در مقایسه با زوایای اویلر ، آهنگسازی آنها ساده تر است. با این حال، آنها به اندازه شهودی و درک آسان نیستند و به دلیل ماهیت تناوبی سینوس و کسینوس، زوایای چرخش که دقیقاً بر اساس دوره طبیعی متفاوت است در ربعهای یکسان کدگذاری میشوند و زوایای بازیابی شده بر حسب رادیان محدود میشوند.![[0,2pi]](https://wikimedia.org/api/rest_v1/media/math/render/svg/348d40bf3f8b7e1c00c4346440d7e2e4f0cc9b91)
استفاده از کواترنیون ها به عنوان چرخش [ ویرایش ]
| این بخش به نقل قول های اضافی برای تأیید نیاز دارد . لطفاً با افزودن نقل قول به منابع معتبر به بهبود این مقاله کمک کنید . اطلاعات بدون مرجع ممکن است مشکل ایجاد کرده و پاک شوند. ( ژانویه 2022 ) ( نحوه و زمان حذف این پیام الگو را بیاموزید ) |

تجسم سه بعدی یک کره و چرخش حول محور اویلر (ه^
در فضای سه بعدی، طبق قضیه چرخش اویلر ، هر چرخش یا دنباله ای از چرخش یک جسم صلب یا سیستم مختصات حول یک نقطه ثابت، معادل یک چرخش منفرد در یک زاویه معین است.
کواترنیون ها یک راه ساده برای رمزگذاری این نمایش محور-زاویه در چهار عدد ارائه می دهند و می توان از آنها برای اعمال (محاسبه) چرخش متناظر به بردار موقعیت (x,y,z) استفاده کرد که نشان دهنده یک نقطه نسبت به مبدا در R3 است . .
بردارهای اقلیدسی مانند (2، 3، 4) یا ( a x ، a y ، a z ) را می توان به صورت 2 i + 3 j + 4 k یا x i + a y j + a z k بازنویسی کرد ، جایی که i ، j ، k بردارهای واحدی هستند که سه محور دکارتی را نشان می دهند (به طور سنتی x ، y ، z، و همچنین از قوانین ضرب واحدهای چهارگانه اساسی پیروی می کنند.
بنابراین، یک چرخش زاویه

را می توان با یک کواترنیون نشان داد. این را می توان با استفاده از فرمول اویلر انجام داد :

می توان نشان داد [ توضیح بیشتر لازم است ] که چرخش مورد نظر را می توان در یک بردار معمولی اعمال کرد
با استفاده از حاصلضرب همیلتون ، که در آن p ′ = ( p x ′, p y ′, p z ′) بردار موقعیت جدید نقطه پس از چرخش است. در اجرای برنامهای، صیغه با ساختن یک کواترنیون به دست میآید که قسمت بردار آن p و قسمت حقیقی برابر با صفر است و سپس ضرب کواترنیونی انجام میشود. قسمت بردار کواترنیون حاصل، بردار مورد نظر p است .
یک حقیقیت هندسی مستقل از کواترنیون ها وجود یک نقشه برداری دو به یک از چرخش های فیزیکی به ماتریس های تبدیل چرخشی است. اگر 0 ⩽





از نظر ریاضی، این عملیات مجموعه تمام ربعهای «خالص» p (آنهایی که قسمت حقیقی آنها برابر با صفر است) - که یک فضای 3 بعدی در بین چهارتاییها را تشکیل میدهند - با چرخش مورد نظر حول محور u با زاویه به درون خود حمل میکند. θ. (هر کواترنیون حقیقی با این عمل به درون خود حمل می شود. اما به منظور چرخش در فضای 3 بعدی، از کواترنیون های حقیقی چشم پوشی می کنیم.)
چرخش در جهت عقربه های ساعت است اگر خط دید ما در همان جهت u → باشد.
در این مثال، q یک کواترنیون واحد است و

نتیجه این است که صیغه با حاصلضرب دو چهارتایی، ترکیب صیغههای این چهارتیونها است: اگر p و q چهارتایی واحد باشند، چرخش (همزمان) توسط pq برابر است با

که همان چرخش (کنژوگه) با q و سپس با p است. مولفه اسکالر نتیجه لزوماً صفر است.
معکوس چهارتایی یک چرخش چرخش مخالف است، زیرا
دو کواترنیون چرخشی را می توان با این رابطه در یک کواترنیون معادل ترکیب کرد:

که در آن q ′ مربوط به چرخش q 1 و به دنبال آن چرخش q 2 است. بنابراین، تعداد دلخواه چرخش را می توان با هم ترکیب کرد و سپس به عنوان یک چرخش واحد اعمال کرد. (توجه داشته باشید که ضرب کواترنیونی جابجایی نیست .)
مثال عملیات صرف [ ویرایش ]
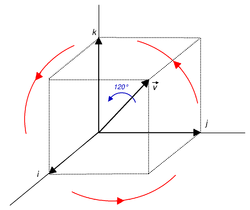
چرخش 120 درجه حول اولین مورب i , j , و k به صورت چرخه ای جای می گیرد
مزدوج کردن p با q به عملیات p ↦ qpq −1 اشاره دارد.
چرخش f حول محور را در نظر بگیرید

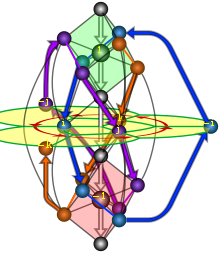
p ↦ q p برای q =1 + i + j + k/2روی واحد 3 کره توجه داشته باشید که این ضرب یک طرفه (یعنی چپ ) چرخش 60 درجه ای از چهارتایی ها را به دست می دهد.
طول v → √ 3 است ، نیم زاویه استπ/3(60 درجه) با کسینوس 1/2، ( cos 60° = 0.5 ) و سینوس √ 3/2، ( سین 60° ≈ 0.866 ). بنابراین ما با صرف کواترنیون واحد سروکار داریم

اگر f تابع چرخش باشد،

می توان ثابت کرد که معکوس یک کواترنیون واحد به سادگی با تغییر علامت اجزای خیالی آن به دست می آید. به عنوان یک نتیجه،

و

این را می توان با استفاده از قوانین معمولی برای محاسبات کواترنیونی ساده کرد

همانطور که انتظار می رود، چرخش مربوط به ثابت نگه داشتن یک مکعب در یک نقطه، و چرخاندن آن 120 درجه حول مورب طولانی در نقطه ثابت است (به نحوه جابجایی چرخه ای سه محور توجه کنید).
ماتریس چرخش مشتق از کواترنیون [ ویرایش ]
یک چرخش کواترنیون 




اینجا

اگر بیان کنیم می توان با استفاده از حساب برداری و جبر خطی به دست آورد








این معادله را می توان به صورت بازنویسی کرد
![{displaystyle {begin{aligned}(0, mathbf {p} ')=&((q_{r}, mathbf {v})(0, mathbf {p} ))s(q_ {r}, -mathbf {v} )=&(q_{r}0-mathbf {v} cdot mathbf {p} , q_{r}mathbf {p} +0mathbf {v} +mathbf {v} times mathbf {p} )s(q_{r}, -mathbf {v} )=&s(-mathbf {v} cdot mathbf {p} , q_{r}mathbf {p} +mathbf {v} times mathbf {p} )(q_{r}, -mathbf {v} )=&s(-mathbf {v} cdot mathbf {p} q_{r}-(q_{r}mathbf {p} +mathbf {v} times mathbf {p} )cdot (-mathbf {v}), (- mathbf {v} cdot mathbf {p} )(-mathbf {v})+q_{r}(q_{r}mathbf {p} +mathbf {v} times mathbf {p}) +(q_{r}mathbf {p} +mathbf {v} times mathbf {p} )times (-mathbf {v} ))=&sleft(-mathbf {v} cdot mathbf {p} q_{r}+q_{r}mathbf {v} cdot mathbf {p}، mathbf {v} left(mathbf {v} cdot mathbf {p} right)+q_{r}^{2}mathbf {p} +q_{r}mathbf {v} times mathbf {p} +mathbf {v} times left(q_{r}mathbf {p} +mathbf {v} times mathbf {p} right)right)=& چپ (0, sleft(mathbf {v} otimes mathbf {v} +q_{r}^{2}mathbf {I} +2q_{r}[mathbf {v} ]_{times }+[mathbf {v} ]_{times }^{2}right)mathbf {p} right),end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/791f3ce917350217ce39c6d61647940686c183f3)
جایی که
![{displaystyle [mathbf {v} ]_{times }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/eb8c75c76fcc67f0d13e3298d0b6de20a0c1254e)


از آنجا که
![{displaystyle sleft(mathbf {v} otimes mathbf {v} +q_{r}^{2}mathbf {I} +2q_{r}[mathbf {v} ]_{times } +[mathbf {v} ]_{times }^{2}right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/af9cc39b5fe69b350b9203c4f82dabeb799e0e3d)
ب
ریاضیات...برچسب : نویسنده : 9math1342d بازدید : 290